型号:YGX82 六维力传感器
特点和用途::
1)采用高强度航空铝合金制作,具有尺寸小,质量轻,强度高特点;
2)采用国际高水准应变计芯片,可实现高分辨率,高响应频率,高测试精度点;
3)100%自主的结构设计,出厂经过精心测试,耦合精度极高;
4)多种通信接口协议可以选择,基本覆盖国内外主流的协作机器人接口;
5)提供调试软件或测试软件;
6)耐折弯高柔性线缆;
7)适用于机器人力控打磨、装配、拖动示教,以及各类科学研究;
量程: Fx/Fy/Fz:50/200/500N Mx/My/Mz:2/10/20Nm (可提供定制)
产品图片


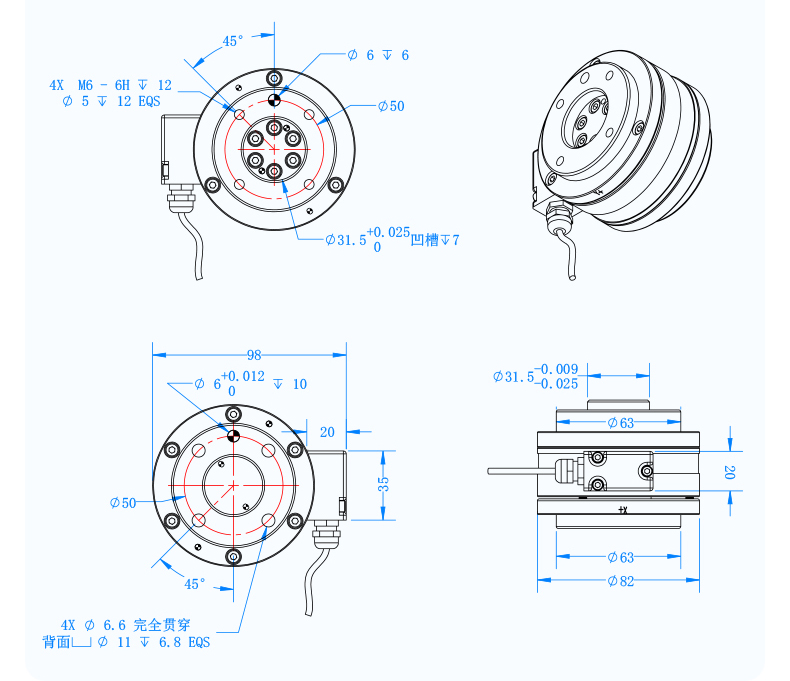
产品尺寸(mm)
技术规格:
|
型号
|
YGX82-50N
|
YGX82-200N
|
YGX82-500N
|
|
量程
|
Fx/Fy/Fz
|
50N/50N/50N
|
200N/200N/200N
|
500N/500N/500N
|
|
Mx/My/Mz
|
2Nm
|
10Nm
|
20Nm
|
|
机械特性
|
|
重量
|
约 500g
|
|
尺寸
|
Φ82mm×41mm
|
|
防护等级
|
IP65
|
|
过载能力
|
300%FS
|
|
刚度
(计算)
|
Fx
|
1.6x107 N/m
|
|
Fy
|
1.6x107 N/m
|
|
Fz
|
1.3x107 N/m
|
|
Mx
|
6059.99Nm/rad
|
|
My
|
6059.99Nm/rad
|
|
Mz
|
10056.99Nm/rad
|
|
电气特性
|
|
输入/输出阻抗
|
350Ω
|
|
通讯接口
|
Mv 矩阵
|
|
工作电压
|
5-15V DC
|
|
电缆长度
|
3m
|
|
精度等级
|
|
分辨率
|
优于 0.1% FS
|
|
非线性
|
优于0.2% FS
|
|
精度
|
优于0.3% FS
|
|
重复性
|
优于0.2% FS
|
|
耦合精度
|
优于1.5% FS
|
|
温度特征
|
|
温度零点漂移
|
0.2%FS/10℃
|
|
零点漂移
|
0.1%FS/30min
|
|
存储温度
|
-25°C ~70°C
|
|
使用环境
|
0°C~40°C,20~80% RH
|
传感器外观结构
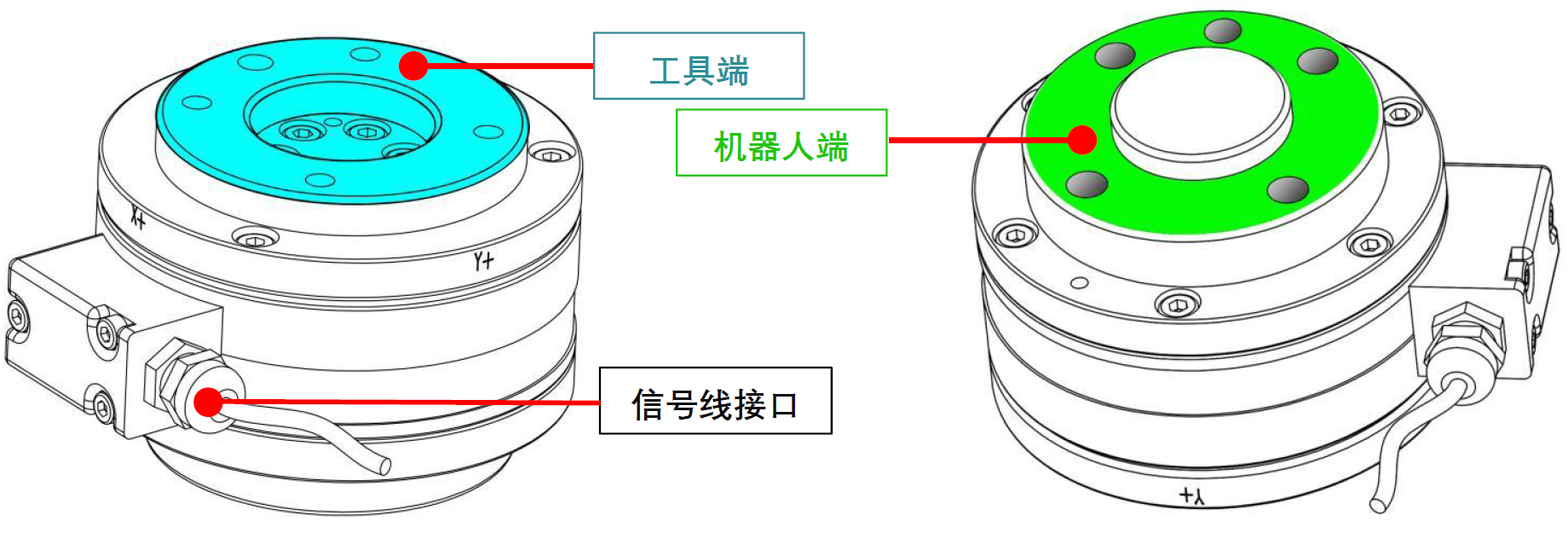
力传感器接触面(蓝色部分)是传感器和工具之间唯一允许的接触面,以确保正确的力和扭矩反馈。机器人接触面(绿色部分)是传感器与机器人末端之间唯一允许的接触面,用于将传感器固定在机器人上。关于工具端和机器人端的螺栓规格和定位销的详细信息可以在规格部分找到,连接机器人端的螺栓和销钉会
附赠在产品包装内
1)YGX82 传感器专为协作机器人进行了设计优化,自带连接法兰,可与大部分标准协作机械臂无缝连接。
2)YGX82 传感器设计为90°直角航空插头或防水接头出线方式,工具端用于装配机器人末端工具,符合GB/T 14468.1-50-4-M6 或ISO 9409-1-50-4-M6标准。
3)机器人端是一个专用法兰,用于传感器与机器人末端的连接,专用法兰适用于GB/T 14468.1-50-4-M6 或ISO 9409-1-50-4-M6 标准的机械连接。
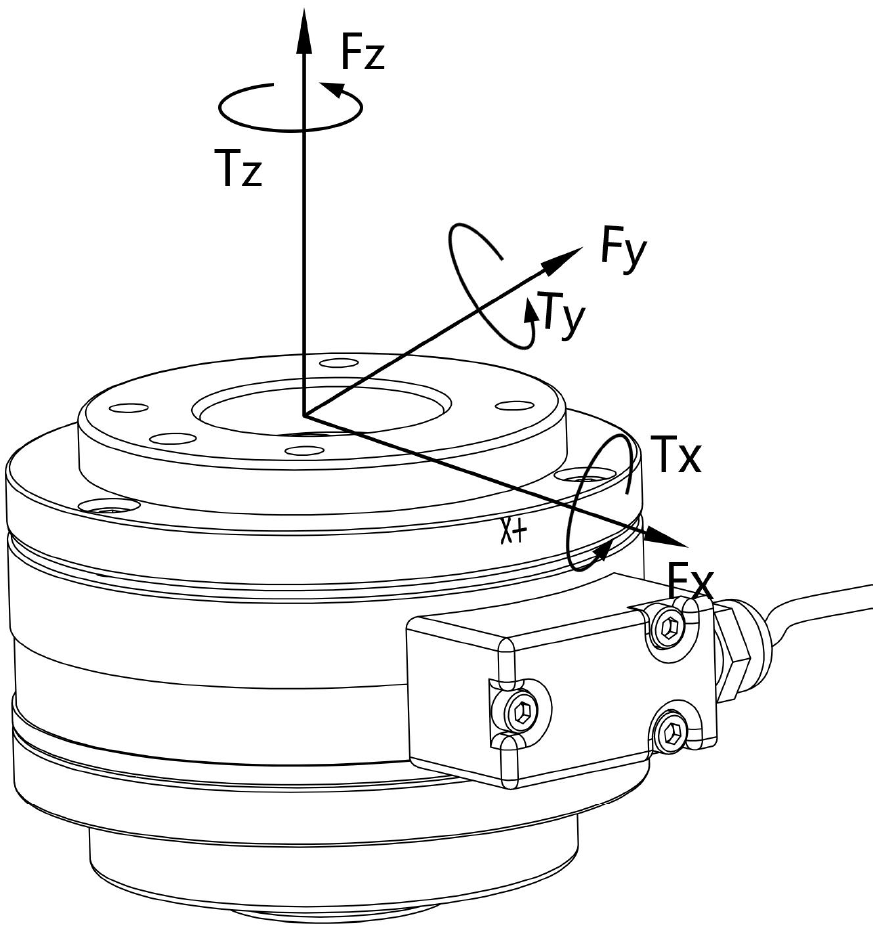
YGX82 传感器的坐标系,X 轴与信号线接口方向垂直,正向指向信号线出口位置反方向;Y 轴与X 轴垂直,正向指向传感器工具端销孔;Z 轴沿传感器轴向中心,正向指向工具端;力矩正方向符合右手定则。
高质量应变计芯片
可能存在的过载


过载能力介绍,这是多维力传感器客户比较关心的点,也是传感器致坏的一个重要的原因(传感器价值高,选型请联系我司工程师)
1:选择量程并不能只考虑所施加的外力,要充分考虑夹具和工件的自重,以及其产生的弯矩。
2:要单独考虑外力因力臂(传感器的中心至受力点的距离)引起的弯矩。
3:传感器的外形整体尺寸和工件夹具尺寸类似。
应用实例