
产品展示 / Products

六维力传感器六轴力传感器
型号:YGX74 六维力传感器
特点和用途:
技术规格:
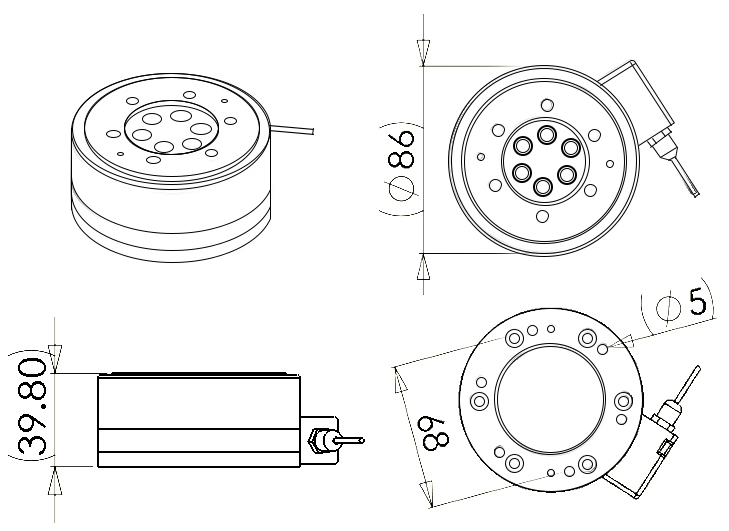
产品尺寸(mm):
特点和用途:
1. 三维力、三扭矩、三倾角数字化传感器
2. 软件解耦、维间耦合误差小于1%
3. 传感器出厂前已经进行精确测试、解耦处理
4. 配套手持仪或者上位机调试软件
5. 提供多种应用案例协并可助客户进行应用研究
6. 多种通信接口,方便与各种上位机设备通信连接。
7. 耐折弯电缆,超长寿命
量程: Fx/Fy/Fz:100/200/500/1000/2000N Mx/My/Mz:1/2/5/10/20Nm(可提供定制)
|
Fx
|
Fy
|
Fz
|
Mx
|
My
|
Mz
|
重量
|
法兰尺寸
|
|
100N
|
100N
|
200N
|
1Nm
|
1Nm
|
2Nm
|
1.2kg
|
Φ86
|
|
200N
|
200N
|
500N
|
2Nm
|
2Nm
|
5Nm
|
1.2kg
|
Φ86
|
|
500N
|
500N
|
1000N
|
5Nm
|
5Nm
|
10Nm
|
1.2kg
|
Φ86
|
|
1000N
|
1000N
|
2000N
|
10Nm
|
10Nm
|
20Nm
|
1.2kg
|
Φ86
|
技术规格:
|
重量
|
1.2kg
|
|
尺寸
|
Φ86mm×42mm
|
|
最大允许过载
|
500%FS
|
|
精度
|
|
|
精度
|
1% FS
|
|
非线性误差
|
<0.2% FS
|
|
迟滞误差
|
<0.2% FS
|
|
重复性
|
<0.2% FS
|
|
蠕变
|
<0.2% FS(30 min)
|
|
零点温漂
|
0.1%FS/℃
|
|
维间耦合(Fz->Fx Fy,Fx->Fy Fz,Fy->Fx Fz)
|
<1% FS
|
|
固有频率
|
|
|
固有频率
|
5000Hz
|
|
刚性
|
500-600 N/μm
|
|
倾角测量
|
|
|
倾角测量分度
|
0.1°
|
|
倾角测量精度
|
0.8°
|
|
接口特性
|
|
|
通讯接口
|
RS485
|
|
数据更新速率
|
40Hz
|
|
通信协议
|
Modbus-RTU
DST-ASC
|
|
工作环境
|
|
|
工作电源
|
10-30V DC <50mA
|
|
工作环境
|
-10~70℃
|
产品尺寸(mm):
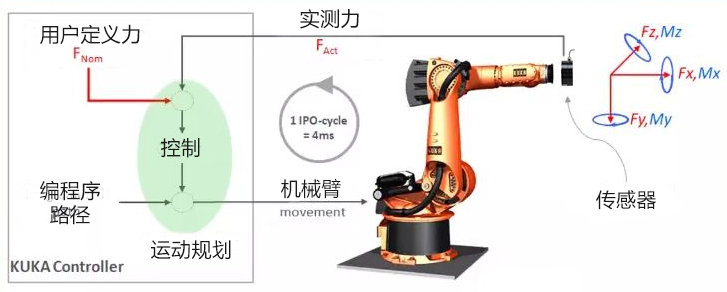
受力方式

力值测量
YGX74 传感器有4 个常用规格型号,量程从100N 到1000N,允许过载500%. 当传感器前端总负载较大、或者机器臂运行时加速高度较大时应考虑总负载惯量对传感器产生的冲击力,因此传感器量程选择要预留足
够的余量。
传感器各个方向的量程不一样,仪表情况XY 轴的量程一致,Z 轴可以根据需要略大或者略小于XY 轴。γ74 经过内部软件解耦后维间耦合误差确保小于1%.
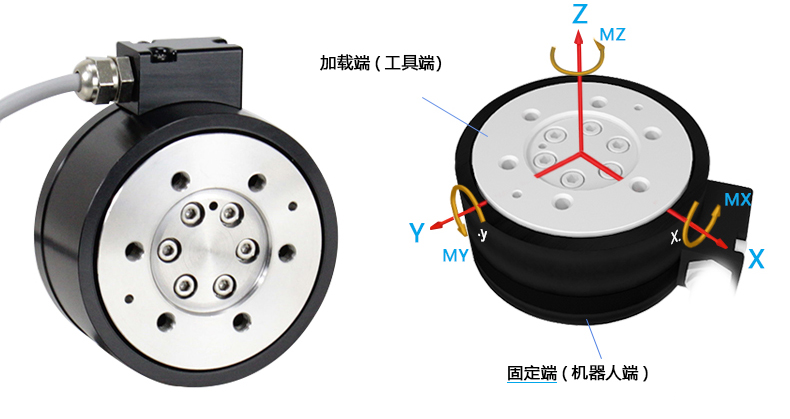
传感器上标注有XYZ 轴的方向,使用时要注意角度偏差对测量值的影响。上下法兰都有定位销,以确保安装的精度。
另外,XY 轴施力点并不是传感器的中心点,也就是力臂不是0,施
加力的同时会产生额外的力臂。
应用实例